Hi, I'm Prithwiraj Paul
Competent in
Dynamic Robotics Software Engineer and emerging leader, with a zeal for challenging boundaries in Robotics and a rapid, enthusiastic learning approach
About
As a dedicated Robotics Software Developer with a robust background in both Mechanical and Computer Engineering, I specialize in advancing the frontiers of Motion Planning, Safe Optimal Control, and Visual SLAM. My technical proficiency spans Python, C++, MATLAB, and ROS, underpinned by a strong adherence to software engineering best practices. My journey has led me through significant roles at the Indian Space Research Organization (ISRO), where I gained extensive experience in spacecraft dynamics, designing control systems, and astronaut training simulators. At Symbotic, I made impactful strides in warehouse operational efficiency by developing and implementing innovative real-time trajectory generation algorithms. My work at UC San Diego's Existential Robotics Lab further sharpened my skills and knowledge with NVidia embedded computers, where I played a key role in building a fully autonomous software stack (Planning, Localization and Controls) for a robotic car, incorporating extensive hardware testing and deployment.
I am well-versed in the nuances of Robot Testing, ensuring that my contributions not only meet but exceed performance benchmarks. My expertise extends to applying sophisticated software engineering practices in real-world robotics applications, seamlessly integrating theory with practice. I am passionate about applying my comprehensive skill set in ROS, Deep Learning, and Autonomous Systems design in a challenging full-time role, aiming to drive innovation and efficiency in the dynamic field of robotics.
Experience

- Developed Real-time Safe Trajectory Planning Software for SymBot - Line Follower Warehouse Automation Robot
- Utilized SimbaSim Gazebo for visualization and analysis of offline turn profiles, gaining insights into bot-driving behavior
- Implemented Model Predictive Control for real-time trajectory generation - achieved higher convergence error and longer planning time (> 1 s) Python Libraries used: CasADi, Numpy, IPOPT Solver
- Executed CBF (Control Barrier Function) - CLF (Control Lyapunov Function) framework to generate real-time safe trajectory through a faster and more efficient Quadratic Programming (QP) formulation (reduced planning time from > 1 s to < 0.3 s)
- Validated trajectories, achieving over 46% optimization time improvement and 10% reduced turn time versus the baseline method
- Successfully integrated online turn planning API into Symbot’s path planner software, conducted software development in C++
- Implemented and executed rigorous unit tests using Google Test, ensuring robust functionality and performance improvement
- Experienced in working as part of an Agile Scrum team and used Jira for bug tracking and task management and GitLab for software version control
- Tools: C++, Python, GitLab, Gazebo, Jira, GoogleTest

- PROJECT 1: Designed active control system that alleviated water impact loads on Crew Module during parachute descent phase of atmospheric re-entry
- Developed a 6-DOF trajectory simulator in Simulink for a 5-tonne crewed spacecraft simulating the atmospheric re-entry dynamics
- Successfully implemented a robust Bang Bang controller with Proportional Derivative control action with 100% duty cycle
- Performed sensitivity studies and achieved a minimum propellant mass of 22 kg (cold gas thruster) for 450 N control force
- Obtained results show successful execution of Bang-Bang control to achieve the desired orientation at touchdown but call for a high control force and thrust requirement by running in 100 % duty cycle (simulation done in Simulink and MATLAB)
- PROJECT 2: Designed and Developed Astronaut Training Simulators for India’s first manned mission, Gaganyaan
- Configured the Static Mock-up and VR simulator defining the end-to-end requirements between the hardware and software modules
- Realized an on-board computation tool conveying the spacecraft’s attitude in LVLH reference frame for crew situational awareness
- Developed an autonomous quick touchdown point prediction tool during on-orbit spaceflight achieving a prediction error of < 1%
- Tools: MATLAB, Simulink

- Worked on hardware design changes to improve efficiency of vehicle RAC machine in the Bosch Automotive Aftermarket division
- Tools: MATLAB, Simulink, SolidWorks(CAD), ANSYS - Structural
Projects
Vision-guided Autonomous Navigation using Reinforcement Learning
- Skills: Robot Perception, Deep Neural Network, Transformer, CNN, ROS, PyBullet, Hardware-Testing and Deployment, OpenCV
- Developed a Neural Network model for learning autonomous navigation in Ackermann drive vehicles, achieving over 95% accuracy with a reinforcement learning agent trained in a PyBullet and Stable-Baselines3 simulated environment
- Executing Sim2Real pipeline for autonomous navigation - Deployed trained RL model using custom C++ ROS node in Nvidia TX2, and benchmarked neural network architectures such as CNN, Transformer, Vision Transformer for image feature analysis
Image Jacobian for Improvement of Online Camera Calibration
- Skills: Computer Vision, Deep Learning, Pose Estimation, PyBullet, OpenGL, OpenCV, Roboticstoolbox-Python, PyTorch
- Streamlined camera calibration with Image Jacobian and DREAM Neural Network for pose estimation, and executed PnP with Forward Kinematics using DREAM, camera intrinsics, and joint angles for enhanced camera pose accuracy
- Utilized Image Jacobian for joint position mapping in virtual camera space with OpenGL for a 7-DOF Panda Robot, and designed a Proportional controller reducing camera angle error by >90% and position error by >95%
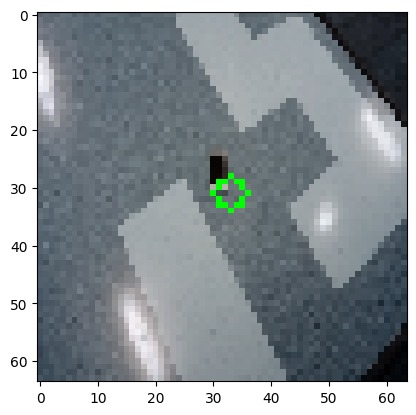
Image-based Visual Servoing – Tracking a moving object
Performance Evaluation of Trajectory Tracking Algorithms for Mobile Robots
- Skills: Model Predictive Control (MPC), Global Policy Iteration (GPI), Non-linear Control, Python, CasADi
- Formulated Markov Decision Process; defined Value function, State Space, Control Space, Dynamic and Kinematic constraints
- Evaluated tracking performance of RHCEC (Receding Horizon Certainty Equivalent Control) and GPI (Global Policy Iteration)
- CEC: Transformed stochastic OC to deterministic Finite Horizon OC, solved as Non-Linear Program using CasADi solver
- GPI: Approximated continuous-time system as discrete-time system, used Value Iteration algorithm for optimal control policy
- Developed a multi-threaded 3-tier Skills-Tactics-Plays architecture for controlling omni-directional robots using ROS
- Results showed CEC is Robust in real-time while GPI is offline and slower, less noise-sensitive, and discretization dependent

Benchmarking Sampling-based and Search-based Motion Planning algorithms in 3D environments
- Skills: 3D Motion Planning, A*, RRT*, Heuristic Function, 3D Graph-search, Data Structures and Algorithms, Python
- Implemented a collision-checking mechanism for a robot’s safe navigation in 3D maze-like environments towards the goal
- Implemented and assessed weighted-A* and RRT, RRT* algorithms for the robot’s goal-reaching performance
- RRT achieved 30% faster and more memory-efficient performance, while A* showed superior path quality with shorter path
- Provided insights into expanded nodes, sampling method heuristic selection (Euclidean, Manhattan distance), aiding algorithm selection based on complexity, efficiency trade-offs, and graph creation efficiency in the sampling-based approach
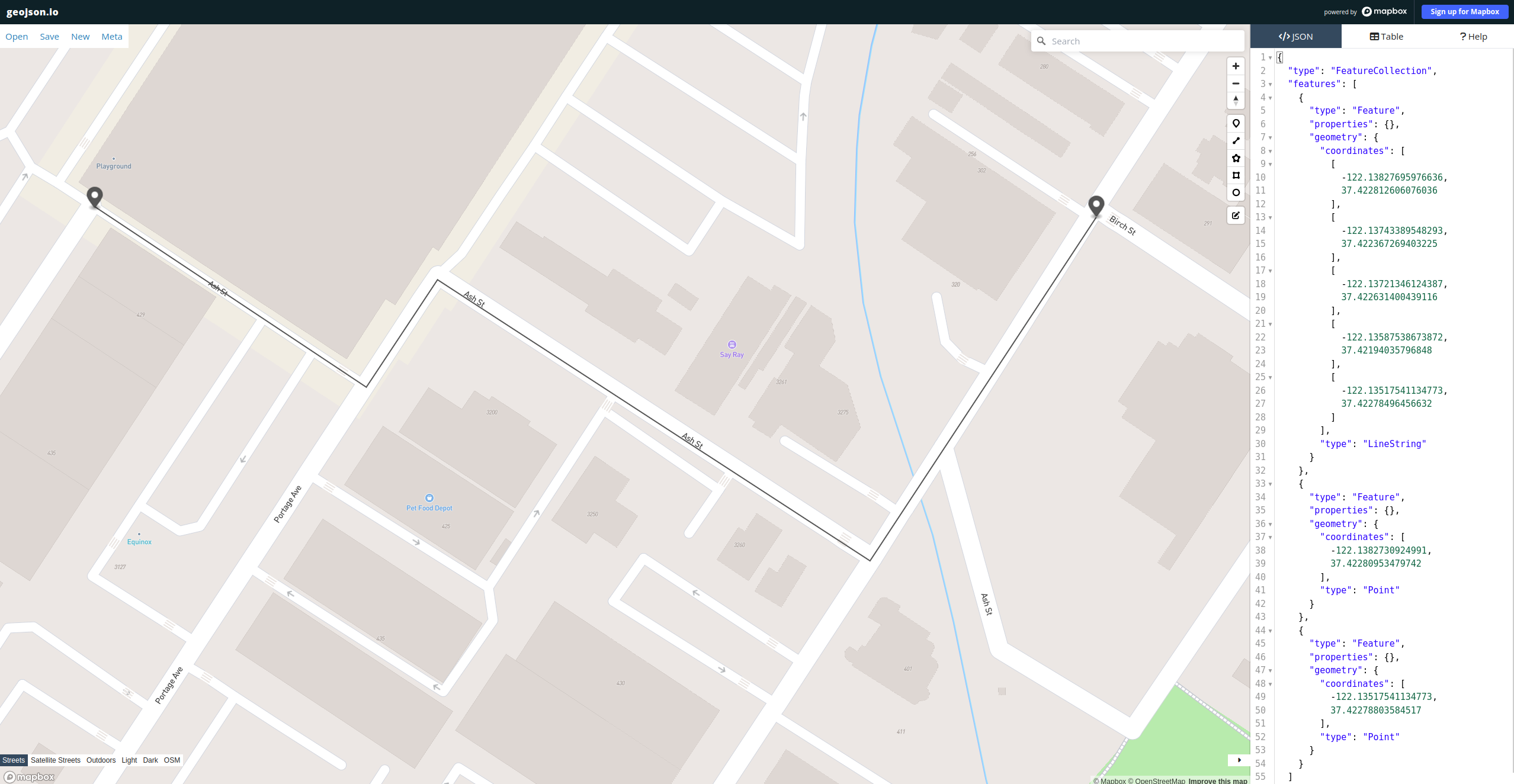
Navigation API development using Open Street Maps
- Skills: Motion Planning, A* algorithm, Data Structures and Algorithms, C++, Unit Testing, Software Development, CMake
- Crafted and deployed a C++ navigation API using OpenStreetMap data, significantly enhancing real-time route planning
- Enhanced navigation accuracy and performance by implementing the A* algorithm through effective API integration
- Conducted extensive unit testing with Google Test for high-precision vehicle positioning using RTK GPS system integration

ROS-Based Indoor SLAM and Mapping on Nvidia Xavier Autonomous Racecar
- Skills: ROS, Hardware Integration and Testing, Sensor Fusion, SLAM, Point Cloud, OctoMap, Voxel Mapping, C++, Gazebo
- Used ROS, Intel RealSense, and Hokuyo 2D Lidar: Conducted hardware calibration and testing; verified functionality in Rvi
- Utilized Hector mapping with lidar data and generated real-time 2D occupancy grids; created octomaps using Octomap ROS package and point cloud and voxel maps using Voxblox , enhancing sensor fusion and data integration
- Utilized Gazebo Car Models and RealSense: Enabled detailed testing and texture mapping for efficient robot path planning
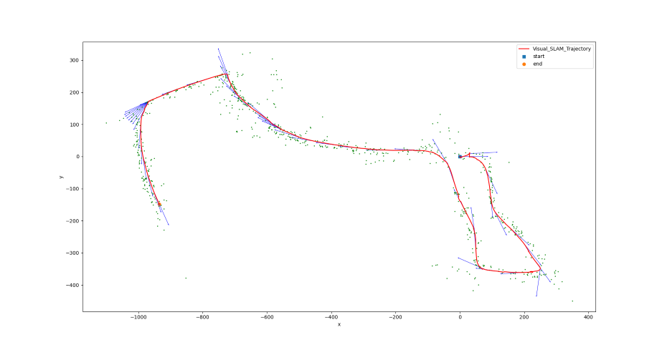
Visual Inertial SLAM using Extended Kalman Filter (EKF)
- Skills: VSLAM, Kalman Filter, Sensor Fusion, IMU and Camera Calibration, SE(3) Kinematics, Map Accuracy, OpenCV
- Conducted sensor fusion for data synchronization between IMU and stereo camera, implementing EKF for real-time positioning and orientation updates of autonomous car pose using SE(3) kinematics and landmark locations
- Analyzed motion and observation model noise sensitivities, achieving 95% environment mapping accuracy through simultaneous car pose and landmark correction using observation model Jacobians
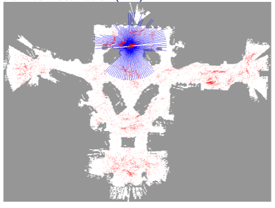
LiDAR-based Particle Filter SLAM
- Skills: Indoor SLAM, IMU and Camera Calibration, Sensor Fusion, 2D Occupancy-grid Map, Texture Map, Python
- Executed LiDAR-based Particle Filter SLAM with Magic Robot, attaining < 5cm localization error and >95% map accuracy
- Crafted motion model with Encoder, IMU, Gaussian noise, scan-grid correlation for precise robot pose, and occupancy-grid mapping
- Enhanced mapping and localization with Stratified Resampling, utilized Kinect RGBD camera for accurate texture mapping

Fast Class-Based Neural Style Transfer (NST)
- Skills: Computer Vision, Deep Learning, PyTorch, Semantic Segmentation, RCNN, Encoder-Decoder, Neural Style Transfer (NST)
- Developed Real-Time Style Transfer Pipeline: Achieved 25 fps on Tesla T4 GPU using a custom 1.64MB Fast NST model
- Boosted Semantic Segmentation with Fast-SCNN: Achieved 68.0% Mean IoU on Cityscape at 123.5 fps, refining style transfer
- Optimized Style Transfer Using pre-trained VGG16: Implemented improved content and style loss (Gram matrix) for qualitative style transfer studies on CityScape and PascalVOC datasets
Autonomous Navigation in a Door & Key environment
- Skills: Python, Gym AI (minigrid)
- Dynamic Programming: Utilizes the Dynamic Programming approach to solve motion planning problems in an environment with doors and keys
- Markov Decision Process (MDP): Models the environment as an MDP, including state space, control space, state transitions, and associated costs
- Value Iteration Algorithm: Implements the Value Iteration algorithm to compute an optimal policy for navigation
Quaternion Trajectory Tracking of Rotating body using IMU measurements
- Skills: Machine Learning, Trajectory Optimization, IMU Calibration, Sensor Fusion, JAX, JAXNumpy, transforms3D, Panorama
- Conducted IMU calibration, including raw ADC values conversion and bias correction, ensuring accurate sensor measurements
- Implemented Machine Learning model with Projected Gradient Descent, optimizing quaternion trajectory using IMU data
- Constructed a Panoramic image by stitching the RGB camera images over time based on the optimized quaternion trajectory
Phone Detection Pipeline using Deep Learning (Object Detection)
- Skills: Computer Vision, Deep Learning, Machine Learning, PyTorch, OpenCV, RCNN, Git, Version-Control
- Developed a PyTorch and OpenCV-based phone detection pipeline, achieving >95% accuracy on a labeled dataset using a customized Faster R-CNN model with ResNet-50 backbone and FastRCNNPredictor
- Performed mini-batch training, with 0.005 learning rate, 0.9 momentum, weight decay, SGD optimizer, and GPU acceleration
- Achieved >90% detection accuracy on the test dataset by engineering a custom dataset class for efficient data management, including image resizing, normalization, and bounding box extraction for precise phone localization
Teaching
- Electrical and Computer Engineering, UC San Diego
- Graduate Teaching Assistant - ECE 276A, Sensing and Estimation in Robotics (Winter 2024)
- Facilitating student learning in Bayesian filtering, SLAM, Convex Optimization – taught skills in probability, linear algebra
- Guiding ~140 graduate students in projects and homework focusing on SLAM, Sensor Fusion, Sensor Calibration, and CV
- Mechanical Engineering, IIT Kharagpur
- Undergraduate Teaching Assistant - Machine Design (Autumn 2020)
Skills
Languages and Softwares
 C++11
C++11
 MATLAB
MATLAB
 Simulink
Simulink
 ROS
ROS
 Gazebo
Gazebo
 RViz
RViz
 SolidWorks
SolidWorks
 Ansys
Ansys
Python Libraries
 SciPy
SciPy
 OpenGL
OpenGL
 Gym
Gym
 CasADi
CasADi
 PyBullet
PyBullet
C++ Libraries
 Eigen
Eigen
 TinyXML-2
TinyXML-2
 PCL
PCL
 OMPL
OMPL
 OctoMap
OctoMap
Other
 Git
Git
 Raspberry Pi
Raspberry Pi
 Arduino
Arduino
Operating Systems
 Linux
Linux
 Windows
Windows
Education
University of California San Diego
San Diego, United States
Degree: M.S. in Intelligent Systems, Robotics and Control
Department of Electrical and Computer Engineering
GPA: 3.86/4.0
- Planning & Learning in Robotics
- Sensing & Estimation in Robotics (SLAM)
- Robot Manipulation and Control
- Deep Learning for Computer Vision
- Probability and Statistics for Data Science
- Statistical Learning
- Linear Algebra
- Linear Systems Theory
- Software Foundations (C++)
- Python Programming for Data Analysis
Relevant Courseworks:
Indian Institute of Technology Kharagpur
Kharagpur, India
Degree: Dual Degree (B.Tech + M.Tech) in Mechanical Engineering
CGPA: 9.24/10
- Intelligent Machines & Systems
- Robots and Robotics
- Soft Computing
- Robots and Computer Controlled Machines
- Systems and Control
- Neuro-Fuzzy Control
Relevant Courseworks: